by Gyrobot, published
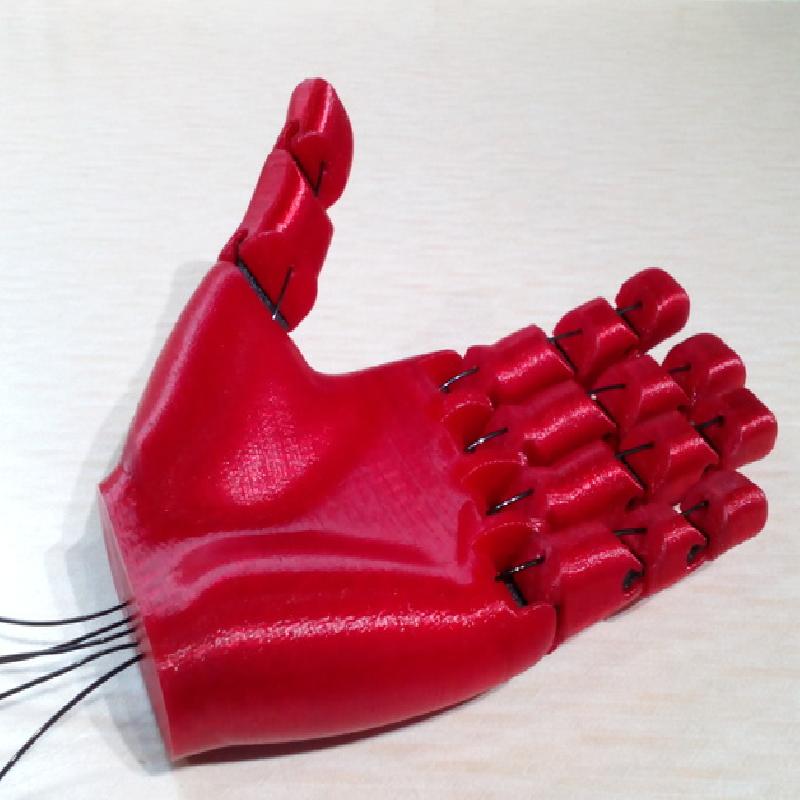
A proof of concept printable hand with "live hinge" flexible joints. Individually activated fingers using Filaflex filament as tendons.
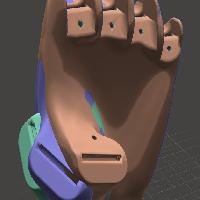
Printed in Makerbot Translucent Red and Filaflex hinges.
Re-mix this idea into your own robotic or prosthetic project.
Fingers open automatically, no return tendons or springs needed.
"Frictionless" articulation - no rubbing parts.
Stretchable tendons offering adaptive grip on irregular objects (only one motor required to activate all fingers).
Fully printable solution, no vitamins required.
Tough and rugged.
Realistic form under a surgical glove (see images).
Video here : http://youtu.be/K8mtqPTJ-Ys
Video review here : http://youtu.be/Z70YWNuOB8E Thanks to 3DUniverse.org and jesimon
Here is an article about the Flexy-Hand on 3DPrint.com
My 1st printed Flexy-Hand (above) is now on display in the iMakr Store, London.
.
EDIT 19/03/2014 : Added an "Opposable Thumb" version of the body.
EDIT 24/09/2014 : Added "Ring Pull.stl" so you can attach to the tendons to make it easier to pull them, see one of the images.
EDIT 16/08.2014 : Added two mounting holes in the base of the Hand for attachment to rigs/arms/boxes etc.
EDIT 29/07/2014 : Increased the tendon hole diameters in the fingers from 2mm to 3mm when printed at full scale. To help printing at smaller scales.
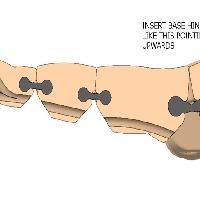
EDIT 16/07/2014 : Put hole in base of finger hinge (7.stl) so that it can be inserted into hand body easier.
EDIT 07/07/2014 : Updated the profile of the base hinges for the fingers (7.stl). This new profile, requires less force to close the fingers, yet it is shaped to better aid finger return.
EDIT 19/05/2014 : Due to Janfigueroa request, added hands (LH/RH) with a more opposable thumb for better grip, print the same fingers for either hand body, The tendons exit the base in this version in a circular pattern instead of a line.
EDIT 06/05/2014 : Two part mould for hinges uploaded from my remix here.
EDIT 02/05/2014 : Right Hand uploaded along with it's fingers.
EDIT 12/03/2014 : After many requests, I have uploaded a STEP file of the hand body (6 - 45deg Thumb Step File.zip)
EDIT 09/03/2014: There has been some confusion regarding how much articulation the fingers have. I have uploaded 3 photos, which show the thumb touching the first two fingers and very close the the ring finger also. I have also uploaded a plate of fingers (yum yum) for anyone who wants to print them all off in one go.
Print hand body without support.
Print finger segments either vertically (as modelled) or horizontally with support.
Print Hinges segments without support.
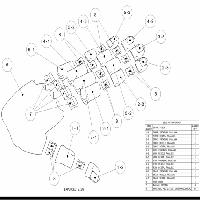
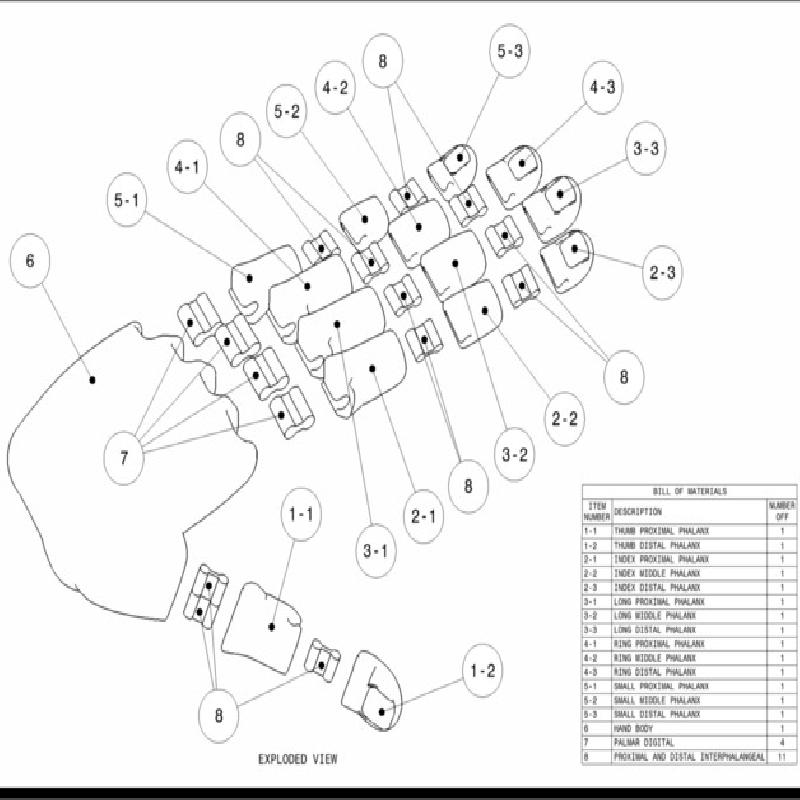
Assemble according to PDF
I modelled for Filaflex which is more elastic than Ninjaflex and other flexible PLA atm. However Ninjaflex does work but it maybe a little harder to assemble hence the hinges that fit into the hand body may need a little extra persuading with a screwdriver etc, maybe with some lubrication that can be washed away, e.g. liquid soap. I printed hinges with no infill and 2 or 3 perimeters (depends on scale) using Slic3r, this makes them nice and "spongy" adjust this if you want stiffer or more flexible hinges. The hinges at the base of the fingers are assembled a certain way round to aid finger return, please see section image to show this. Any issues getting the base hinges in can also be helped by using a craft knife and trimming a little off either the hinge or the body of the hand, YMMV
You can also cast your own with silicon sealant using the Hinge Mould which I also include here for completeness.
Pre-stretch a length of 1.75mm Filaflex filament till it wont elongate any more, this reduces it's thickness. This stuff is so strong, I have yet to snap it. Feed each end through the two filament holes in the end of the finger tip. Both ends of the filament should come out of the same hole in the base of the finger tip part (see section image plus photo). Tie off in a none slip knot (left over right then right over left) and snip off one of the excess strands. If tensioned correctly the knot should hide itself in the base hole of the finger tip. Thread the tendon down through the finger segments out of the base of the hand.